|
|||||||


| Важная информация |
 |
|
|
Опции темы | Опции просмотра |
форум осваивающих КОБ |
|
|||||||
| Важная информация |
|
|
|
Опции темы | Опции просмотра |
|
#1
 27.02.2013, 14:26
27.02.2013, 14:26
|
|||
|
|||
|
В каких ситуациях управляемый параметр из вектора управляющего воздействия попадает в вектор целей, если в отношении него изначально нет цели, а значит и его отклонение ошибки от допустимой границы посчитать нельзя?

|
|
#2
27.02.2013, 17:17
|
|||
|
|||
|
Какая разница находится управляемый параметр в векторе целей или нет? Управляемый параметр является индикатором управляющего воздействия и показывает, правильно осуществляется управляющее воздействие или нет.
|
|
#3
27.02.2013, 17:45
|
|||
|
|||
|
Цитата:
Если управляемый параметр входит в вектор целей, то в отношении него выставляется цель и высчитывается ошибка, и только после этого становится доступна оценка его отклонения от технического нуля или допустимого значения. Само по себе текущее значение управляемого параметра не позволяет делать выводы об отклонении. В ДОТУ говорится, что при "определённых" обстоятельствах управляемый параметр может войти в вектор целей. А ещё, что в аварийном режиме, может меняться иерархия контрольных параметров.
|
|
#4
27.02.2013, 17:49
|
|||
|
|||
|
Цитата:
|
|
#5
27.02.2013, 18:19
|
|||
|
|||
|
Есть данные об объекте управления и управляемом параметре, и есть динамика их изменения. Сначала изменяем управляемый параметр, потом смотрим данные об объекте. Если динамика объекта устраивает, продолжаем в том же ключе. Если нет - подбираем ключ. Сложно писать инструкцию, проще сесть за руль автомобиля и поехать.
|
|
#6
27.02.2013, 19:23
|
|||
|
|||
|
Цитата:
Вы обсуждаете какую-то абракадабру. Всякое управление рассчитывается как функционирующая система.Задаётся целевая функция в голове системы,представляемой в виде древа с ветвями листьями (узлами) системы: потребители-производители,потери,затраты и др. 2.Оценивается целевая функция через коэффициент эффективности, методами математической статистики. Коэффициент эффективности задаётся в диапазоне 75-95%. ----------
|
|
#8
27.02.2013, 21:52
|
|||
|
|||
|
Все термины взяты из ДОТУ. Называть их абракадаброй - значит расписываться в своём незнании материала. А раз не знаете, чего помогать лезете?
Речь про первые четыре этапа ПФУ:
и про: 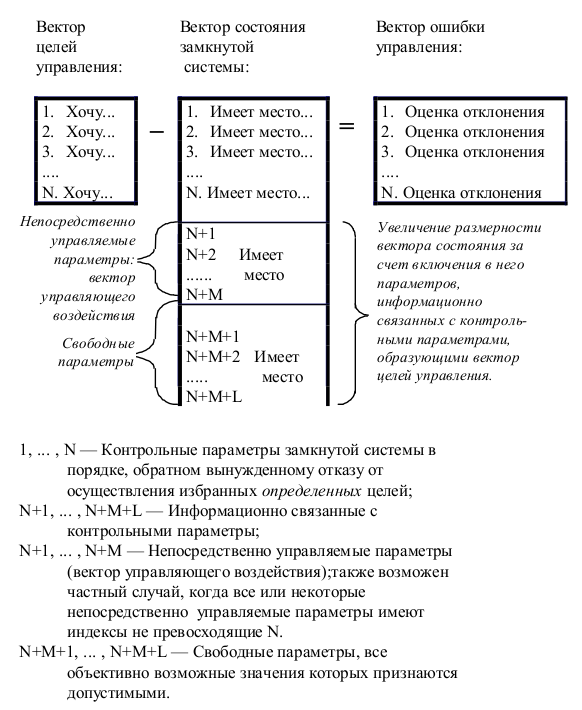 Перечитайте ДОТУ, освежите память. Чуть позже разжую как могу вопрос.
|
|
#9
27.02.2013, 22:05
|
|||
|
|||
|
Идём по порядку.
На первом этапе ПФУ вносим на рассмотрение фактор среды - будущий объект управления. На втором мы должны дать оценку этому фактору. Для этого выписываем параметры его характеризующие. В отношении каждого параметра определяемся с приборной базой и метрологией. На основании выявленных параметров даем субъективную оценку возможности управлять объектом. На третьем этапе мы должны сформировать три набора данных: вектор целей, вектор состояния, и вектор ошибки. Вектор состояния и вектор ошибки формируются из одних и тех же параметров. Часть параметров мы уже определили на втором этапе. Теперь нужно выявить остальные и разобрать их на контрольные, управляемые и свободные. Для контрольных параметров устанавливаются целевые значения и определяется иерархия. Именно этот набор будет представлять вектор целей и вектор ошибки. в вектор состояния входят все выявленные параметры. В частности управляемые - те от которых зависят контрольные. На четвертом этапе ПФУ, из контрольных параметров формируется вектор управляющего воздействия.
|
|
#10
27.02.2013, 22:10
|
|||
|
|||
|
Теперь снова вернёмся на третий этап.
После того как мы вычислили вектор ошибки, состоящий из всё тех же контрольных параметров характеризующих фактор среды. Мы даем оценку режиму управления. Если все значения компоненты вектора ошибки находятся в рамках "технического нуля", режим считается нормальным. Если значения компонент выходят за рамки "технического нуля", но не выходят за рамки "допустимого значения" режим считается допустимым. И, наконец, если есть значения за рамками "допустимоых" но система ещё не разрушилась, режим признаётся аварийным.
|
|
#11
28.02.2013, 12:01
|
|||
|
|||
|
Может кто может объяснить ситуацию с режимами лучше меня?
Есть два типа режимов работы: балансировочный режим и манёвр. Балансировочный режим - это колебания вектора ошибки в допустимых пределах. Вектор целей сам является режимом - идеальный режим. Чем по сути являются режимы :«нормальное управление, управление в потенциально опасных обстоятельствах, аварийное и т.п.»? Если не ошибаюсь, то каждый из, указанных в кавычках, режимов является балансировочным и предполагает собственную упорядоченность наборов параметров (вектор целей, вектор управляющего воздействия). Маневр же - это переход из одного режима в другой. есть легкая путаница с тем. Что манёвр сам является режимом. Обобщая: система может находиться либо в одном из балансировочных режимов (их может быть значительно больше, чем три упомянутые: нормальный, допустимый, аварийный), либо в состоянии перехода от одного к другому. Получается, что чем больше мы определяем балансировочных режимов, тем больше наборов параметров нам нужно держать. Всё правильно излагаю?
|
|
#12
28.02.2013, 14:45
|
|||
|
|||
|
Цитата:
В тексте не упоминается, чем является термин "производная по времени". Следует ли под ним понимать скорость изменения значения текущего состояния изменённого контрольного параметра? Грубо говоря если процесс достижения цели идёт с постоянной скоростью, манёвр считается установившимся?
|
|
#13
28.02.2013, 15:12
|
|||
|
|||
|
Цитата:
Цитата:
__________________
Боишься - не делай, делаешь - не бойся.
|
|
#14
28.02.2013, 15:36
|
|||
|
|||
|
Цитата:
А делать это нужно, например, создателям аудиокниги. Им следовало бы учесть сложность восприятия термина для людей забывших математику. Но это минус уже аудиокниги, как носителя.
|
|
#16
28.02.2013, 16:11
|
|||
|
|||
|
Цитата:
В случае же с `производной по времени` есть явно доминирующее значение термина и уточнение излишне. Цитата:
Если постоянно и во всём рассчитывать, что слушатель ни чего не знает, то тем кто знает будет крайне скучно слушать.
__________________
Боишься - не делай, делаешь - не бойся.
|
|
#17
28.02.2013, 16:14
|
|||
|
|||
|
Цитата:
Что такое "нормальное управление, управление в потенциально опасных обстоятельствах, аварийное и т.п."? Далее аварийное управление упоминается в Главе 13.7: Цитата:
Цитата:
Предположу, хотя и нет абсолютной уверенности в истинности такого мнения: В процессе достижения цели (вектор целей, который является идеальным режимом) мы имеем множество промежуточных состояний. Для каждого их этих состояний мы должны определить режим работы (балансировочный режим или манёвр) а уже для этого режима задавать границы оценки (технический ноль, допустимое значение 1, ..., допустимое значение n, авария). И указанные три или более реальных режима будут оценкой качества воплощения ВЫБРАННОГО РЕЖИМА (балансировочный или манёвр). При всей гладкости такой трактовки остаётся вопрос с возможностью автоматического включения манёвра в аварийном режиме выбранного режима. То есть если какая то компонента выскочила за рамки допустимого значнеия, её нужно вставить в вектор целей с требование вернуть значение в положенные рамки. Но тут другой вопрос, если мы отслеживаем вектор ошибки (в отношении которого и опредеяется аварийность режима) ТОЛЬКО для ключевых параметров, как мы узнаем, что неключевой параметр вышел за рамки допустимых значений? Прошу прощения за излишний объём текста. В сжатом вариант вопрос вызывает ощущение абракадабры.
|
|
#19
28.02.2013, 23:37
|
|||
|
|||
|
Тут стоит отметить, что методик системного разбиения на группы типов управления существует великое множество...
И в разных местах могут использоваться разные методы разбивки, зависимо от задачи. Цитата:
В принципе может и порой даже это делает, но не должна... При деление управления на `нормальное, в потенциально опасных обстоятельствах, аварийное` имеет анализ процесса и степени его предсказуемости/управляемости. При деление на `балансировочный режим или манёвр` идёт деление относительно цели. Так что эти системы хоть статистически и связаны, но на деле говорят о разном.
__________________
Боишься - не делай, делаешь - не бойся.
|
|
#20
01.03.2013, 00:46
|
|||
|
|||
|
Цитата:
Так в разбиение на `манёвр / балансировка` балансировка может содержать несколько локальных манёвров, а балансировка несколько манёвров. То же касается и деление на `нормальное / аварийное` управление. Цитата:
Если же не допускается выход за какие-то рамки, то значит он включается в какой-то из ключевых. Так же параметр относится к второстепенным если его отклонение от допустимого крайне маловероятно. Если же у вас всё завалилось из-за второстепенного параметра, то вы просто не корректно расставили приоритеты.
__________________
Боишься - не делай, делаешь - не бойся.
|
|
#21
01.03.2013, 10:35
|
|||
|
|||
|
Цитата:
Есть изменения в векторе целей — имеем манёвр, нет — балансировочный режим. Режим управления (нормальный, допустимый...) - это оценка вектора целей. Она определяет качество управляющего воздействия. То есть эти разбиения не взаимозаменяемы. Но они взаимосвязаны. Потому что, в случае аварийного управления встаёт необходимость расширить вектор целей, то есть совершить манёвр. Меня как раз и интересует эта ситуация с необходимостью манёвра в аварийном режиме. Цитата:
Цитата:
|
|
#22
01.03.2013, 11:05
|
|||||||
|
|||||||
|
Цитата:
Цитата:
Цитата:
Цитата:
Цитата:
В работе "Основы социологии" Часть 1, Глава 6.5 есть такой абзац: Цитата:
Цитата:
|
|
#23
01.03.2013, 14:27
|
||||||||
|
||||||||
|
Цитата:
"стратегическая цель" - это глобальные и долгосрочные цели, порой весьма размытые. "тактическая цель" - это локальные конкретные цели, служащие как правило для достижения стратегических. Цитата:
Та же стратегическая и тактическая цели могут быть и в одной управляющей структуре. Но стратегическая будет `10 лет без инфляции` - очевидная балансировка. А тактическая `поправка в какой-то закон распределения бюджета` - очевидный манёвр. Итого структура одна (правительство) и одна цель реализует другую. При том параметры отслеживания у них разные, да и `аварийность` так же может быть разная т.к. критерии разные. Так стратегическая цель может содержать и аварийную тактическую. Например удерживая фронт стратегически (нормальное управление), понести сильные потери со стороны одной из частей (аварийное). Правда тут не совсем одна и та же структура, хоть и там и тут одна армия, но за стратегию и тактику отвечают разные люди. Но это не обязательно и в жизни человека и за то и за другое отвечает одна голова. Цитата:
Если же рамки анализа могут быть разными (короткосрочный/долгосрочный), то уже нет. Цитата:
Они конечно в идеале должны совпадать, но это увы случается не всегда. Так что это описка, а осознанно применённый термин. Цитата:
И он становится ключевым только когда совсем выходит за рамки допустимого. Это не значит, что при управление он совсем не учитывается, а лишь то что он сводится до `сигнальной лампочки`. Цитата:
Порой стоит применить правила русского языка и здравый смысл, чтоб из терминов `второстепенный` и `параметр` получить `второстепенный параметр`. Отдельное определение требуется только если результат отличен от получаемого данным путём. В частности `второстепенный параметр` - это не ключевой (то есть деление по критичности). Цитата:
__________________
Боишься - не делай, делаешь - не бойся.
|
|
#24
01.03.2013, 15:34
|
|||
|
|||
|
Цитата:
Одновременно для одного управленца параметр не может являться и свободным и контрольным. Цитата:
ЗЫ: мне, определённо, пошла на пользу наша беседа
|
|
#25
01.03.2013, 17:26
|
|||||
|
|||||
|
Цитата:
Именно по этому и идёт деление на всевозможные задачи и статусы. Цитата:
Балансирующий - это когда не планируется изменений. А если маленький вектор ошибки - это нормальное управление. Вы смешали белое с мягким, а зря... это в корне разные системы деления процесса... Да, если процесс был балансировочным и вдруг стал аварийным, то чаще всего стоит сделать манёвр, дабы вывести его из аварийности, но это далеко не всегда так однозначно. Вот вы едите на машине в потоке - это балансирующий процесс. И вдруг вам в глаз попадаете какая-то бяка или вас слепит кто-то из встречки. И тут ситуация стала уже аварийной. Вы не видите дорогу и не можите нормально управлять. Но вот стоит ли делать манёвр или нет - далеко не факт. На машине можно медленно начать сбрасывать скорость, а на самолёте что делать пилоту частично ослеплённому лазером? Цитата:
Цитата:
Цитата:
Вы ведь видя красную машину так и говорите `проехала красная машина`, а не определяете перед этим `красная машина` - это автомобиль красного цвета (в системе RGB кодами от *** до ***). Да, слушатель может не так понять, но в противном случае это ОЧЕНЬ долго.
__________________
Боишься - не делай, делаешь - не бойся.
|






 Линейный вид
Линейный вид

