В общем смысл схем довольно простой:
1)
Есть некий процесс которым мы хотим управлять и у него есть желаемые и нежелательные конечные состояния.
2) Есть
идеальный режим управления процессом (без возмущающих воздействий) который формируется пошагово тем же методом динамич. программирования от конечного состояния вспять к начальному, дорисовывая как объективно возможные промежуточные состояния, так и конкретные шаги (управляющие воздействия) между этими состояниями
3) Есть
процессы - вредители затрагивающие управляемый процесс, которые своими возмущениями могут привести наш процесс к нежелательному конечному состоянию.
4) Есть
опыт и предвидение множества недопустимых состояний процесса, и способов компенсации возмущений.
 http://3.bp.blogspot.com/-KCNAJMUgz2...%BE%D1%832.png
http://3.bp.blogspot.com/-KCNAJMUgz2...%BE%D1%832.png
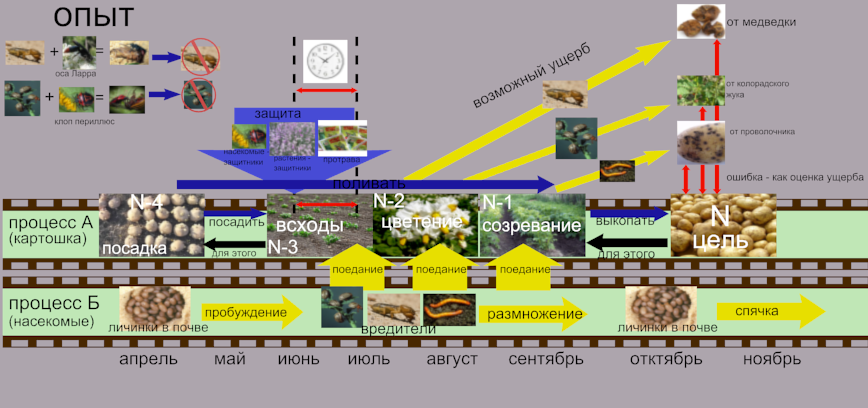
Пример - опять самый понятный и бытовой
1) Управляемый процесс - выращивание картошки , желаемое состояние - большой урожай, нежелательное конечное состояние - отсутствие урожая.
2) Идеальный режим - посеял , поливеашь, через несколько месяцев собираешь большой урожай, погода устойчивая, теплая, насекомых- вредителей нету.
3) Вредный процесс - размножение насекомых - жрущих корнеполоды, которые могут пожрать весь урожай (колорадский, медведка, проволочник,и др.)
4) Есть опыт борьбы с насекомыми
и предвидение того, когда эти насекомые проснуться, выползут из земли, и начнут жрать урожай + есть знание о том насколько РАНЬШЕ до пробуждения вредителей надо оказывать воздействие на них (и вредные процессы), чтобы УСПЕТЬ скомпенсировать возмущение. - Короче насколько раньше до появления насекомых - вредителей нужно обрабатывать картошку, разводить др. насекомых - защитников или сажать растения - защитники, отпугивающие вредителей,
так чтобы на выходе был в идеале нетронутый урожай.